トロント大学、マギル大学、Lunenfeld-Tanenbaum Research Instituteによるカナダの研究チームが発表した「Toward a living soft microrobot through optogenetic locomotion control of Caenorhabditis elegans」は、生きている線虫を操作可能なロボットに改造する研究だ。線虫に青色のレーザー光を照射して直進や旋回を指示する
photo
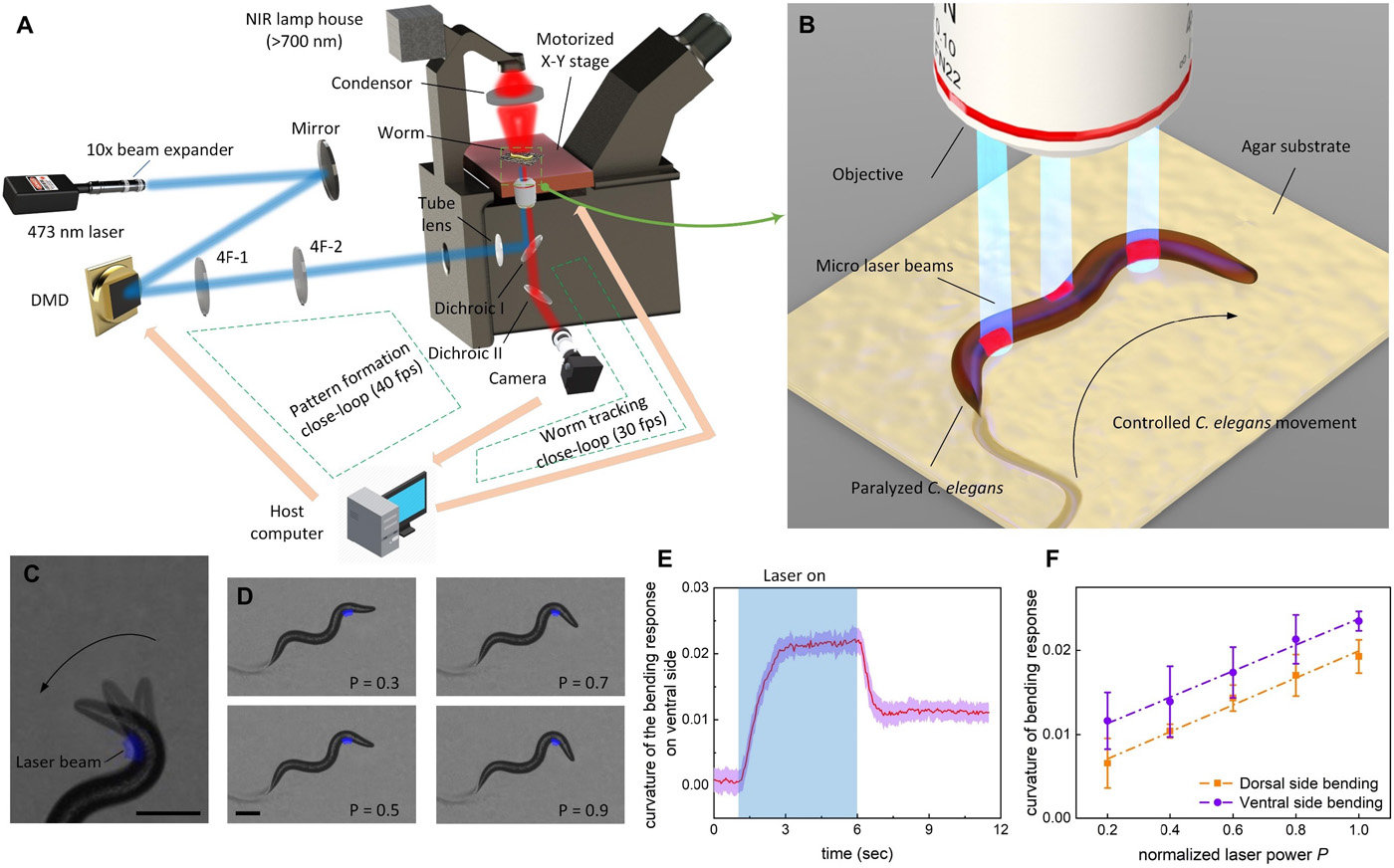
レーザー光照射システムの設定と、レーザー光照射による線虫の屈曲応答の実験
線虫は、手足や触覚、骨を持たない細長い糸状の生物(体長0.3~1mm)。今回は、土壌中に生息するカエノラブディティス・エレガンス (Caenorhabditis elegans)を用いて検証した。この線虫は、卵から成虫までの細胞の分裂パターンや組織への分化の仕組みが解読されているため、実験において重要な生物とされている。
この研究では、線虫の遺伝子と神経系を工学的に操作し、筋肉細胞を光遺伝学的手法によって自動制御した。青色レーザー光を線虫の筋肉細胞に照射すると、筋肉細胞が興奮して、周囲の体の部位が筋肉のトルクで収縮・屈曲する。
この効果を使って、あらかじめ「イベルメクチン」という薬品でまひさせた線虫の動きを操作する。線虫は体を蛇行させて前進するため、蛇行運動が発生するように青色レーザー光のパターンをプログラムして筋肉を収縮させる。
photo
線虫の蛇行運動を分析し、レーザー光を照射するパターンをプログラムする
これにより直進だけでなく、緩やかな旋回や垂直に曲がることも可能だ。移動中の様子を高速カメラで捉え画像処理を行い、リアルタイムで視覚的にフィードバックするため、移動方向や移動先を制御できる。実験では、迷路をナビし、目的地への誘導に成功した。
photo
直線だけでなくカーブや旋回運動も可能
photo
迷路内のスタート地点から目的地点まで線虫を制御する実験
今回の研究結果は、線虫型の完全なマイクロロボットの設計に応用でき、他の線虫の基礎研究にも役立つという。